반응형

산업 현장에서 4차 산업혁명을 대표하는 것은 무엇이 있을까요?
글쓴이는 로봇을 떠올리게 됩니다.
로봇은 인간이 하기 힘든 영역의 복잡하고 위험한 일들을 빠르고 일률적으로 수행합니다.
로봇의 정의
Robot이란 자유도를 포함하고 기계적 메커니즘으로 구성된 기계로써 프로그래밍 모션을 통해 특정 물체 (재료나 부품 등) 를 이동시키고 다양한 작업을 수행하고 반복적인 기능을 일률적으로 수행할 수 있는 장치로 정의합니다.
다관절을 가지고 있는 로봇의 움직임을 보고 있으면 신기하다는 생각과 멋지다는 생각을 들게 합니다.
빠른 동작과 정확성은 물론 중량물을 휙휙 들어 올리고 물체(Work) 에 맞게 Gripper 를 장착하면 특정 목적의
기구적 운동(Vacuum, Gripping, 용접, 절단, 너트러너)을 수행할 수 있습니다.
로봇을 사용하는 이유와 사용분야
4차 산업혁명과 관련한 자동화 장비의 중요 요소로 로봇을 꼽을 수 있습니다.
인간의 영역 밖의 위험하고 더러운 작업에 있어서 인간을 대신하고 있습니다.
로봇의 주요 특징 세 가지는 반복성(Repeatability), 정밀성(Accuracy), 자유도(Degrees of Freedom) 입니다.
다관절 로봇의 경우 높은 작업 가능한 범위 내 (Range) 높은 자유도와 정밀성 반복성 3가지를 동시에 만족하여
수행할 수 있다는 자유도란 3개 이상의 관절이 각각 각도를 가지고 있기 때문에 범위내에서 모든 각도에서의 움직임이 가능합니다.
(다만 관절 별로 최대한 뻗거나 꺾는 Limit 이 있기 때문에 이 부분은 주의해야 합니다.)
로봇을 사용하는 이유는 아래와 같이 정리할 수 있습니다.
로봇을 사용하는 이유는 아래와 같이 정리할 수 있습니다.
- 사람이 수행할 수 없는 유해한 환경에서의 작업
- 반복적인 작업
- 중량물과 같이 사람이 다룰 수 없는 물체의 취급
- 부품의 위치 및 방향 제어 시 정밀함을 필요로 할 때
위의 주요 사용 이유를 바탕으로 적용 분야를 가늠해 볼 수 있습니다.
- 물체의 이송 (중량물 위험물 등)
- 용접
- 너트조립
- 도장(스프레이, 코팅 작업)
- 조립
- 검사
- 자동차
산업용 로봇의 종류
산업용 로봇의 종류에는 어떠한 것들이 있을까요?
수직 다관절 로봇 <Articulated Robot>
수직 다관절 로봇은 3개 이상의 관절을 가지고 있으며 프로그래밍을 통한 서보 제어를 기반으로 다양한 움직임과
각도 작업 수행이 가능합니다.
메이커별로 로봇의 모델별 가반중량에 차이가 있으며 Gripper를 별도로 구성 부착하여 Work 를
파지하거나 고정, 이송을 하게 됩니다.
반복 동작에 대한 정확도가 +,- 0.02mm로 고정도를 자랑하기 때문에 제조 품질에 대한 일관성을 유지할 수 있습니다.
초기에 프로그래밍과 Robot Teaching 과정을 통해 작업에 대한 학습을 저장하고 경로 및 Work 를 수행하게 됩니다.
작업이 복잡하고 관절의 움직임에 대한 Teaching 이 많아 질 수록 로봇의 속도가 저하되고 이는 Tack time 에 영향을 미치게 됩니다.
따라서 초기 선정 과정에서 로봇의 회전반경 및 움직임에 대한 사전 Study 가 필요합니다.
로봇의 움직임 반경내에 회피해야 할 장애물이 많을 수록 로봇의 회피 기동이 불 필요하게 늘어나고 이는 로봇 속도 저하의 원인이 됩니다.
다관절 로봇 선정과정에는 전문가와 Work 흐름에 대한 높은 이해도를 갖고 있는 인력의 참석이 필수적입니다.
한번 설치한 로봇은 교체하기 힘들기 때문에 Tack 타임과 Work flow 를 면밀히 검토할 필요성이 있습니다.

스카라 로봇 <SCARA Robot>
수직 다관절 로봇에 비해 비교적 단순한 Work 를 다루는데 사용하는 것으로
각각의 회전 반경을 가지고 연결 조인트에 축(Z) 방향으로
이송 장치가 포함되어 있습니다.
물건을 흡착하여 분류, 이송하거나 구멍에 볼트를 조립, 삽입하는 맞춤 작업에
적합한 형태의 로봇입니다.

델타 로봇 <Delta Robot>
평행사변형 형태의 xyz 방향에 링크로 구성되어 있는 로봇

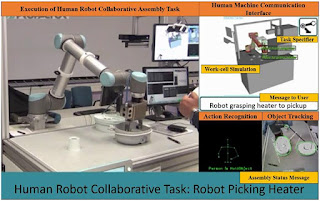
협동 로봇 <Collaborative Robot>
일반적으로 로봇의 행동반경에는 펜스를 쳐서 작업시 사람의 출입을
방지하는데 협동 로봇은 작업장 내 오픈된 공간내에서
사람과 함께 상호 작용을 통해 작동하는 로봇입니다.
로봇 센서를 통해서 근처에 충돌 위험이 있는 인체의 접촉을
방지하는 기능이 포함되어 있습니다.
산업용 로봇의 구성요소
산업용 로봇의 구성은 크게 아래의 6가지로 구성되어 있습니다.
- Robot Arm : 로봇의 관절부
- Servomotors : 프로그래밍 서보 제어를 위한 모터
- Controllers : 컨트롤러는 로봇의 동작, 순서를 처리하고 입력에 대한 정보를 처리하며 출력 구동신호를 제어하는 역할을 하는 머리 역할을 담당합니다
- Teach Pendant : 티칭 시 사용하는 장치
- Power supply : 전원공급장치
- Robot Tooling : Gripper, 용접 툴과 같은 파지나 작업을 수행하는 부분
오면 Teach pendant 를 가지고 Teaching 하는 모습을 볼 수 있습니다.
조작반 같은 모양을 하고 있습니다.

INSIDE INSIGHTS ENCYCLOPEDIA
반응형
'기계설계 자료&계산서' 카테고리의 다른 글
| 오일미스트 집진기 (0) | 2023.11.19 |
|---|---|
| 자동화설비의 목적과 장점 단점 (0) | 2023.11.16 |
| Conical spring washer 를 사용하는 이유 (0) | 2023.11.09 |
| NPT 나사탭 규격 참고표 (테이블 모음) (0) | 2023.11.06 |
| 가공도면 약어 표기 (0) | 2023.11.06 |

댓글